弹一弹#2 方块与圆の碰撞物语
Posted on 2018-05-03
编译原理好鸡儿难,课设真尼玛烦,俺现在只想摸鱼 _(┐「ε:)_
前言
对于两个物体之间的碰撞检测,依据两个物体本身属性的不同,所采取的策略也不尽相同。简单的来说可以分为3大类:
- 依据每一帧中,几何图形的重合来检测
- 基于像素、地图格子来检测
- 基于速度矢量与相应判别条件来检测
在弹一弹的例子中,第一种应该是首要的检测方式,后面两种如果俺开心再写吧【滑稽】
而在第一种中,又有几种不同的情形需要采取不同策略对待:
- 圆-圆
- 无旋转矩形-无旋转矩形
- 圆-矩形(可有旋转)
- 任意多边形
其中1和2都太过耿直,在此不做说明。本水文着重讨论第3种情形,第4种会更的嗯,俺有骗过你么 (’へ’)
圆 & 无旋转方块儿
我们要解决的问题,本质上就是要知道圆与矩形有无“接触”——而有了圆-圆检测的经验后,不难想到,我们要做的就是找到矩形上离圆最近的点,通过这一点到圆心的距离与圆的半径之间的比较,就能确定圆与矩形是否接触:
图片来源:凹凸实验室
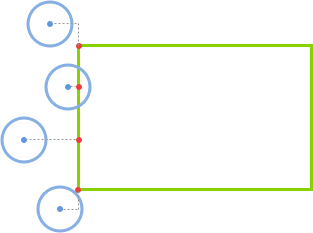
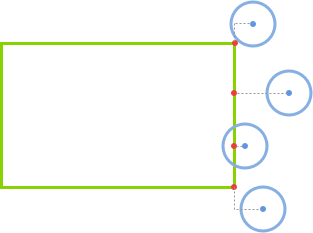
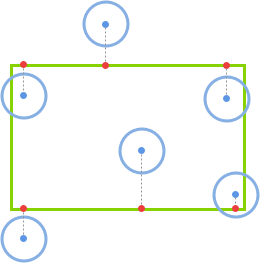
不难看出这个最近点在x轴、y轴与圆心之间的关系,可以参考下面这个demo:
See the Pen rect&ball by Zhouyi (@padfoot_07) on CodePen.
圆 & 旋转方块儿
如果矩形旋转了a度,只需要以矩形中心为旋转中心,旋转画布-a度,我们就又回到了上面一种无旋转情形!
换而言之,我们需要额外做的,就是计算旋转后的圆心。那么首先推导一下某个点绕原点旋转一定角度后的坐标:
证明来源:凹凸实验室
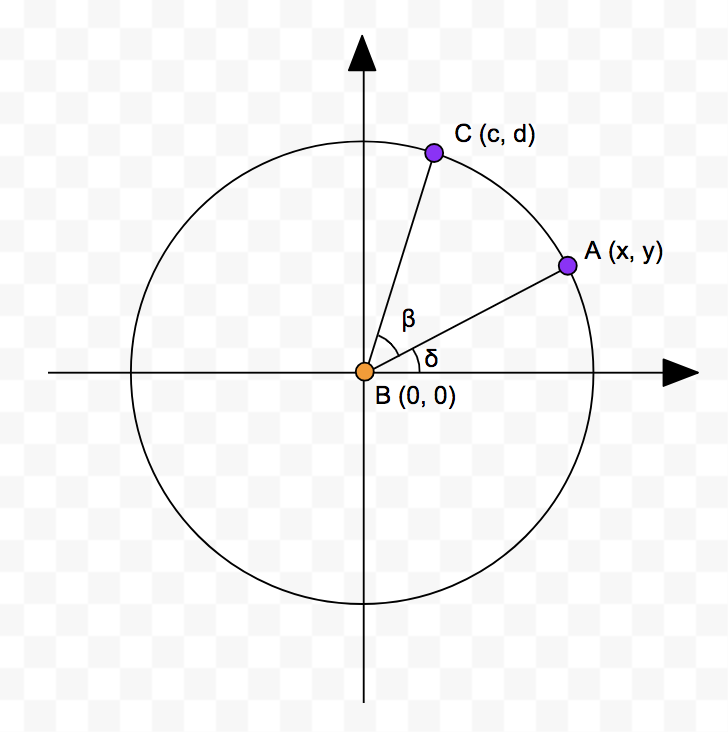
A为旋转前,B为原点,C为旋转后,r为半径,则
- 设 A 点旋转前的角度为 δ,则旋转(逆时针)到 C 点后的角度为(δ+β)
- 由于 |AB| 与 |CB| 相等(即长度),且
- |AB| = y/sin(δ) = x / cos(δ)
- |CB| = d/sin(δ + β) = c / cos(δ + β)
- 半径 r = x / cos(δ) = y / sin(δ) = d / sin(δ + β) = c / cos(δ + β)
- 三角函数两角和差公式:
- sin(δ + β) = sin(δ)cos(β) + cos(δ)sin(β)
- cos(δ + β) = cos(δ)cos(β) - sin(δ)sin(β)
- 得出旋转后的坐标
- c = r * cos(δ + β) = r * cos(δ)cos(β) - r * sin(δ)sin(β) = x * cos(β) - y * sin(β)
- d = r * sin(δ + β) = r * sin(δ)cos(β) + r * cos(δ)sin(β) = y * cos(β) + x * sin(β)
那么对于旋转中心 (centerX, centerY) ,其实只要做一个坐标轴平移的工作:
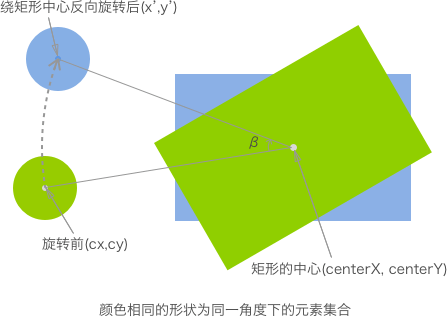
x’ = cos(β) * (cx – centerX) – sin(β) * (cy – centerY) + centerX
y’ = sin(β) * (cx – centerX) + cos(β) * (cy – centerY) + centerY
以上就是我们需要的旋转公式。
下面这个demo中应用了上述理论,透明度较低的是旋转后的图形:
See the Pen rotatedRect&ball by Zhouyi (@padfoot_07) on CodePen.
好了不多说了,我只想看下一集小英雄,再见了您!